地下工程系盾构智能掘进研究团队在土木与计算机交叉学科著名期刊《Computer-Aided Civil and Infrastructure Engineering》(简称CACAIE)上,发表了土压平衡盾构智能化施工最新研究成果“Muck volume measurement of earth pressure balance shield using 3D point cloud based on deep learning”,并被选为CACAIE第40卷、25期的封面论文。
Qin, Shaojie, Yong Fang, Xiao Wang, Junfeng Zhou, and Song Luo. 2025b. “Muck Volume Measurement of Earth Pressure Balance Shield Using 3D Point Cloud Based on Deep Learning.” Computer-Aided Civil and Infrastructure Engineering m(April):4296–4320. doi: 10.1111/mice.70067.
论文链接:
https://onlinelibrary.wiley.com/doi/10.1111/mice.70067
盾构掘进过程超挖会导致地层损失,甚至引发地表坍塌,对城市基础设施和交通运输构成严重威胁。现有施工技术通常通过人眼观察渣斗装载程度估算出渣体积,存在可靠性低、耗时久、误差大等问题。本文提出了一种渣土体积测量算法和三维点云分割模型(SMPN),旨在实现高精度、自动化的渣土量监测与盾构掘进控制。SMPN通过点序列化注意力交互方法,克服了点云无序性、稀疏特性对局部注意力计算的限制;为精准分割渣土表面与渣斗的动态边界,模型设计了法向量条件位置编码以增强点云空间特征表征。研究通过真实盾构渣土点云数据对模型进行训练和测试,其平均准确率、平均交并比和总体准确率分别达到0.987、0.971和0.983。渣土体积计算最大误差为3.65%,平均误差为2.71%,体积误差远低于人工观测;SMPN对单个点云样本的平均处理时间为32.5秒,较人工分割效率提升约60倍。相较于传统渣土体积测量方法,文章提出的自动化测量系统大幅度提高了渣土体积控制的准确性、时效性、可靠性,为提升盾构施工质量、防治盾构施工滞后沉降提供了核心技术保障。
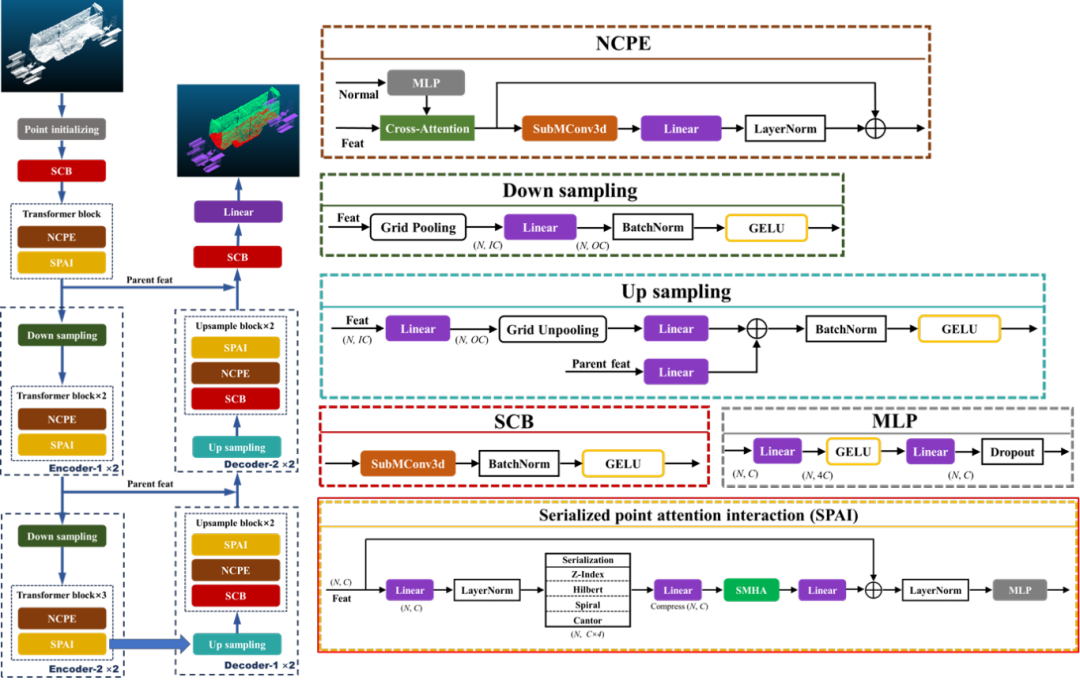
图1 SMPN的网络架构
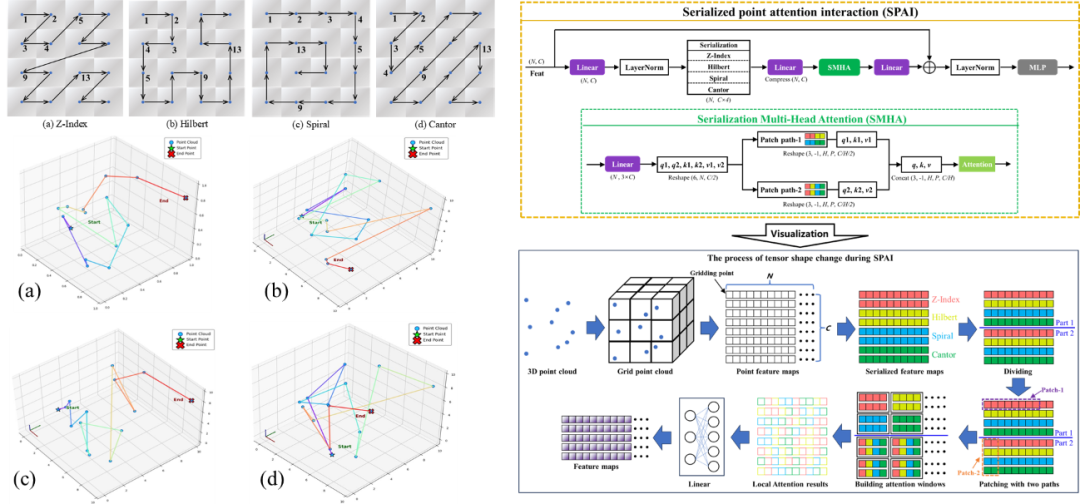
图2 点云序列化注意力交互方法
1.提出了盾构渣土体积的精确测量与计算方法。该方法通过线激光雷达扫描移动的渣土运输车,获取完整的渣土箱三维点云,再通过点云分割提取渣土表面点集,最后计算渣斗装载体积。所提出的体积计算方法简化了不规则三维空间体积求解中的多重积分过程,提高了计算效率。
2.提出了盾构渣土点网络(Shield Muck Point Network, SMPN)。SMPN有效结合了稀疏卷积(Sparse Convolution)与点云Transformer,提高了模型的计算效率。同时,引入四种空间填充曲线实现点云序列化,并通过提出的法向量条件位置编码(Normal Conditional Positional Encoding, NCPE)增强点云空间位置信息的表达能力。
3.提出了序列化点注意力交互模块(Serialized Point Attention Interaction, SPAI),该模块通过将不同序列化顺序的点云划分为多个窗口,实现感受野与点分布的自适应调整。此外,SPAI进一步通过不同特征块路径的组合扩大注意力窗口的交互范围,从而提升点云特征的全局建模能力。
1.模型的平均精度(mAcc)、平均交并比(mIoU)和总体精度(oAcc)分别达到0.987、0.971 和 0.983。模型能够清晰地划分渣土与渣箱的边界,其计算精度足以满足工程施工要求。此外,模型推理时间仅为32.5秒,点云处理速度较人工方法提升60倍以上,具有显著的工程应用价值。
2.与当前最先进的点云分割方法相比,SMPN的平均精度(mAcc)和渣土类别的交并比(IoU)分别比性能优异的Swin3D提高了0.019和0.028。此外,在渣土类别的IoU和准确率指标上,SMPN的分割结果平均值最高、四分位距(IQR)最小,表现出相较于其他先进方法更高的稳定性与可靠性。
3.消融实验结果表明,所提出的法向条件位置编码(NCPE)相较于现有的条件相对空间编码(cRSE),使模型的mAcc、mIoU和oAcc分别提高了0.043、0.030和0.033。点云序列化有效提升了Transformer模块的计算性能,而提出的序列化点注意力交互模块(SPAI)通过融合不同的序列化路径,进一步提升了模型的分割精度。
4.工程现场测试结果表明,SMPN在体积计算中的最大分割误差为3.65%,平均误差为2.71%,整体误差范围满足施工控制要求。基于深度学习的激光雷达扫描体积测量方法在可靠性、精度、智能化及自动化水平方面较现有施工测量技术有显著提升。
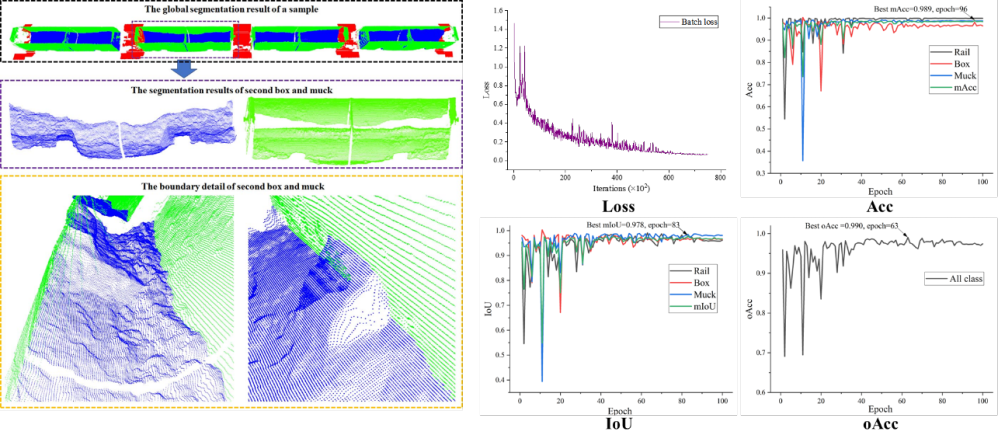
图3 点云分割及模型评估结果
盾构智能掘进研究团队致力于推动人工智能技术在土木工程盾构或TBM隧道领域的深度融合与创新应用,并积极推动科研成果的转化与落地。团队博士后覃少杰为该论文的第一作者,方勇教授为通讯作者。研究成果由西南交通大学、成都轨道集团合作完成,是团队成员在该期刊上发表的第二篇学术论文。

覃少杰(第一作者)
覃少杰,西南交通大学地下工程系在职博士后,主要开展盾构隧道智能建造、隧道病害检测、隧道群智慧运维等方面研究。在《Comput. Civ. Infrastruct. Eng.》、《IEEE Trans. Intell. Transp. Syst.》、《Tunn. Undergr. Sp. Technol.》等期刊发表多篇文章。

方勇(通讯作者)
方勇,教授、博导,国家高层次人才,四川省首届杰出青年科学技术创新奖获得者,现任地下工程系主任、极端环境岩土和隧道工程全国重点实验室(西南交通大学)副主任,交通隧道工程教育部重点实验室副主任。主要从事盾构(TBM)隧道智能建造、特长隧道及隧道群智慧运维等方面研究。